 14° C
14° C LIVE
LIVE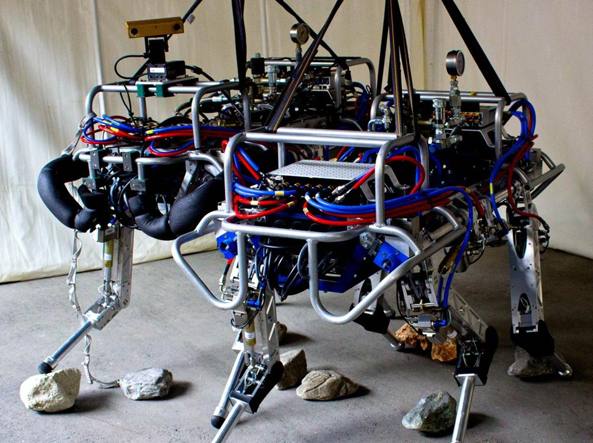 Si chiama HyQ-Blue il robot quadrupede su cui stanno lavorando il Dipartimento di Ingegneria industriale dell’Università di Trento e l'Istituto italiano di tecnologia (Iit). Adatto per la montagna, resistente e agile, il 'mulo' robot - dicono i ricercatori - è in grado di muoversi su terreni impervi, trasportare carichi pesanti e andare al trotto. Il robot, al centro di un accordo di collaborazione tra l'ateneo trentino e l'Itt di Genova, è stato trasferito da Genova a Trento dove verrà studiato per i prossimi tre anni. HyQ-Blue pesa 90 chili, è lungo un metro, ha il corpo in lega di alluminio, è capace di camminare, trottare, salire e scendere scale, portare e trainare pesi, proprio come farebbero i muli degli alpini.
Si chiama HyQ-Blue il robot quadrupede su cui stanno lavorando il Dipartimento di Ingegneria industriale dell’Università di Trento e l'Istituto italiano di tecnologia (Iit). Adatto per la montagna, resistente e agile, il 'mulo' robot - dicono i ricercatori - è in grado di muoversi su terreni impervi, trasportare carichi pesanti e andare al trotto. Il robot, al centro di un accordo di collaborazione tra l'ateneo trentino e l'Itt di Genova, è stato trasferito da Genova a Trento dove verrà studiato per i prossimi tre anni. HyQ-Blue pesa 90 chili, è lungo un metro, ha il corpo in lega di alluminio, è capace di camminare, trottare, salire e scendere scale, portare e trainare pesi, proprio come farebbero i muli degli alpini. L'obiettivo a lungo termine del progetto è creare software, algoritmi e hardware robusti per robot quadrupedi che riescano ad accedere a zone impervie caratterizzate da terreni accidentati e che possano intervenire, in caso di catastrofi naturali, nelle ispezioni di luoghi inaccessibili all'uomo e a supporto di attività in montagna e nell'ambito agricolo. "Cercheremo di migliorare ulteriormente le capacità di HyQ-Blue per avvicinarci sempre più a delle prestazioni necessarie per applicazioni reali", dice Andrea Del Prete, responsabile scientifico dell'accordo per l'Università di Trento".
"Useremo algoritmi di apprendimento automatico per velocizzare le tecniche di controllo del robot (basate su ottimizzazione numerica) e quindi migliorare le sue capacità di reazione ai disturbi e agli imprevisti. Inoltre - aggiunge - il robot sarà usato come piattaforma di validazione degli algoritmi di controllo sviluppati nelle attività di ricerca del Dipartimento". Progettato e costruito all'Itt di Genova, nel laboratorio Dynamic Legged Systems diretto da Claudio Semini, HyQ-Blue fa parte della serie di robot animaloidi HyQ azionati idraulicamente (non elettrici), sviluppati dai ricercatori dell'Iit a partire dal 2007 traendo ispirazione dalla natura.








IL COMMENTO
Silvia Isola Mercoledì 24 Aprile 2024 Mario Paternostro Martedì 23 Aprile 2024
leggi tutti i commentiAborto? Con le mie amiche parlo di congelare gli ovuli
Il diario-testamento di Pippo Marcenaro? Una magnifica "sciarada" ricca di maniman…